Leveraging Generative AI for Traffic Accident Scenario Simulation: A Study Based on Extracted Collision Trajectories from Video Data
Meine Masterarbeit an der Hochschule Landshut
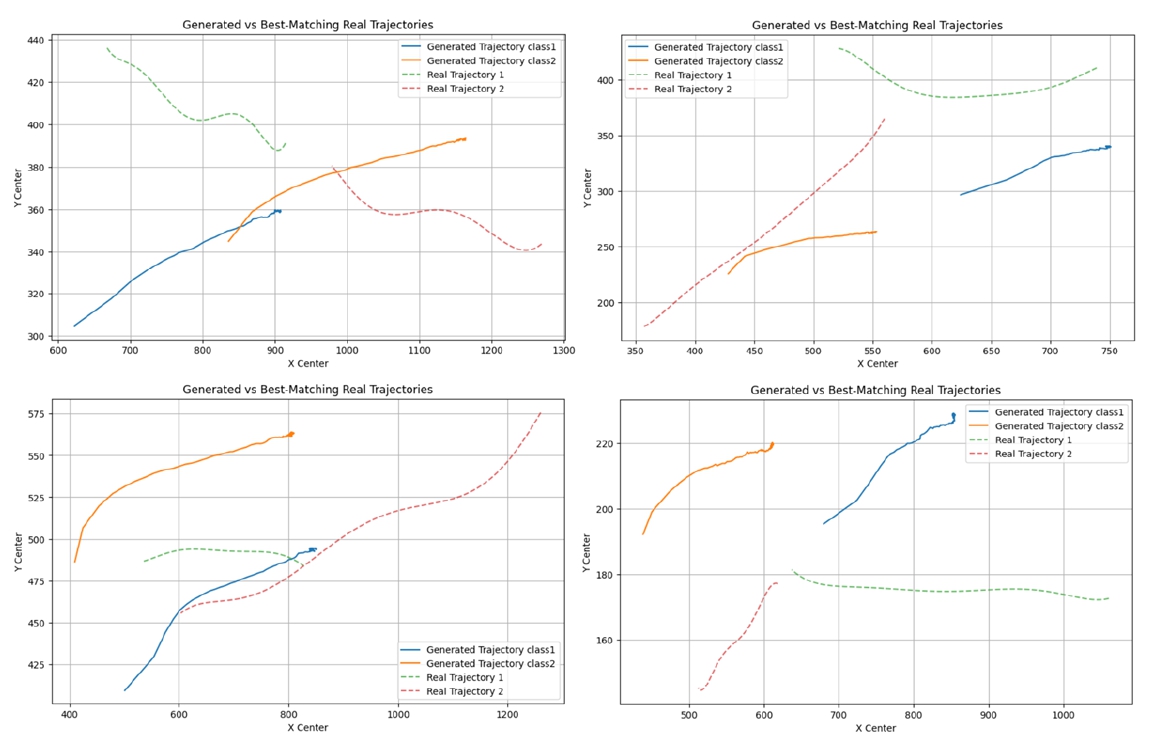

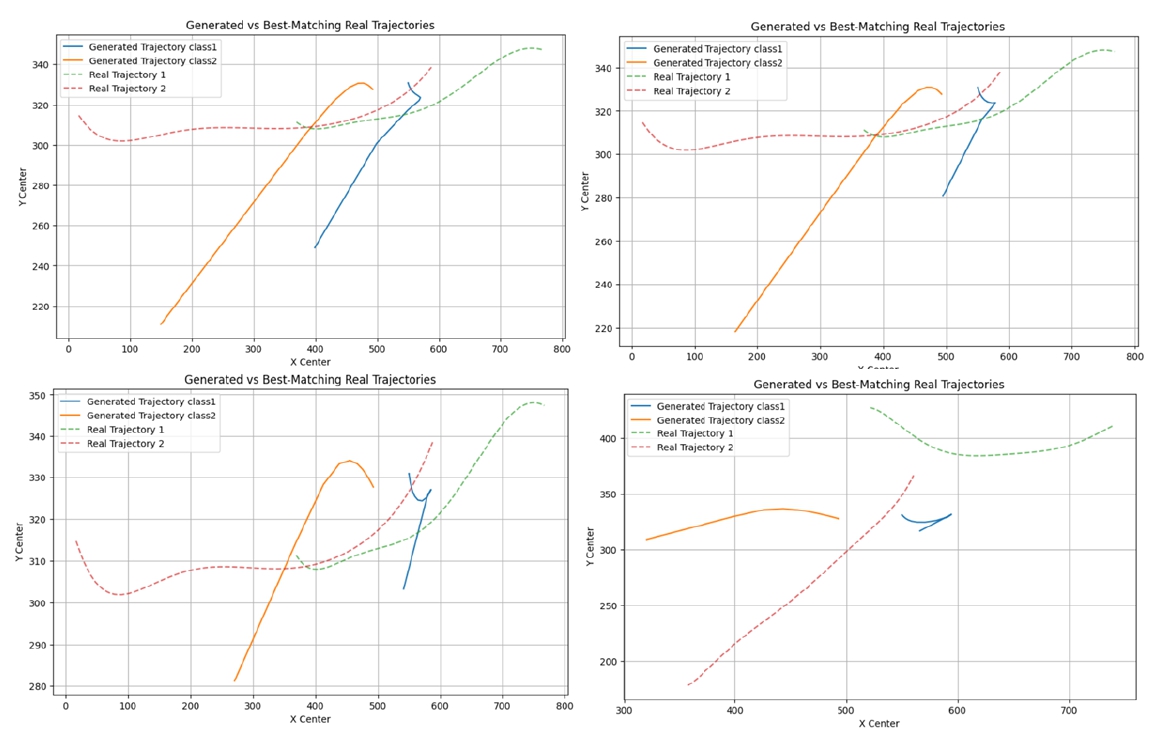
Autonomous vehicles need to navigate both standard traffic situations and rare, complex, and hazardous events, like road traffic accidents. However, the shortage of diverse and realistic data on accident trajectories limits the training and evaluation of AI models intended for these scenarios. This thesis addresses this challenge by exploring the potential of Generative AI to simulate multi-agent vehicle collisions using trajectory data extracted from videos. We implement and assess three generative architectures—Variational Autoencoders (VAEs), Generative Adversarial Networks (GANs), and Denoising Diffusion Probabilistic Models (DDPMs)—to evaluate their ability to generate accident trajectories that are physically plausible, temporally consistent, and socially interactive. The research employs a realworld dataset of labeled vehicle collisions and introduces new preprocessing methods to standardize, interpolate, and normalize trajectories, ensuring inter-agent dependencies are maintained. Each generative model is trained to produce two-vehicle trajectories based on their initial positions, allowing for the creation of semantically relevant variations such as near-misses or evasive actions. To evaluate the authenticity and realism of the generated samples, we apply metrics like Dynamic Time Warping (DTW), minASD, and minFSD, alongside visual inspections. The results indicate that the diffusion model achieved the best combined result. While the MTG VAE had constantly low DTW scores, the diversity metrics showed that the low DTW was a result of the generation of similar trajectories with slight variations in every instance. This study provides valuable insights into the most effective generative AI model for generating multi-agent accident trajectories using the currently available small dataset.